Контролер повороток з двох супутникових мотопідвісів по DiSEqC. Part II
20.09.2023 00:38
Сергій - UR3QJ
 902
902
902Додаткова інформація: raxp2.blogspot.com (по запрошенню)
Всі питання на пошту [email protected]


У другій частині додав інженерне меню та підтримку частини основних команд протоколу Yaesu GS-232 для автотрекінгу Orbitron-ом:
Інженерне меню
Для регулювання уставок (за замовчуванням -75 до +75 і допускає розширення -359 до +359) в автономному режимі перед увімкненням затисніть кнопку "Mode" і утримуйте її до появи заставки, при її появі відпустіть кнопку та з'явиться "Engineer Menu". Регулювання уставок MinRange здійснюється кнопками +/-, для регулювання MахRange одноразово натисніть кнопку + (або -) і після одразу + (або -). Щоб вийти з інженерного меню, натисніть кнопку "Mode".
Автономне керування
1. Перехід між режимами "DiseqC/DDS/SWR Fmin/SWR Fmax/SWR Zoom" здійснюється послідовним натисканням кнопки "Mode".
2. Керування азимутальним мотопідвісом за кнопками +/-, для керування мотопідвісом елевації одноразово натисніть кнопку + (або -) і після відразу + (або -). Положення ротора щодо півночі (нуля) відображається на дисплеї як цифрами, так і менімонічно. Команда на мотопідвіси надсилається через 1 секунду неактивності після останніх натискань на кнопки +/-.
3. Частота DDS та SWR Fmin/SWR Fmax контролюється кнопками +/-.
Віддалене управління
Налаштування порту 57600/8/N/1
Команди верхнього рівня в ASCII:
fxxxxxxxx Перемикання в режим DDS та завдання частоти в Hz
s Перемикання в режим панорамного аналізатора SWR (при цьому контролер надсилає панораму)
Wxxx eee Завдання азимуту та елевації (Orbitron/GS-232)
Mxxx Завдання азимуту (Orbitron/GS-232)
exxx Завдання елевації
rxxx Завдання уставки MaxRange
gxxx Завдання уставки MinRange
Все про антени, MESH мережi на Lora, РЕБ та РЕР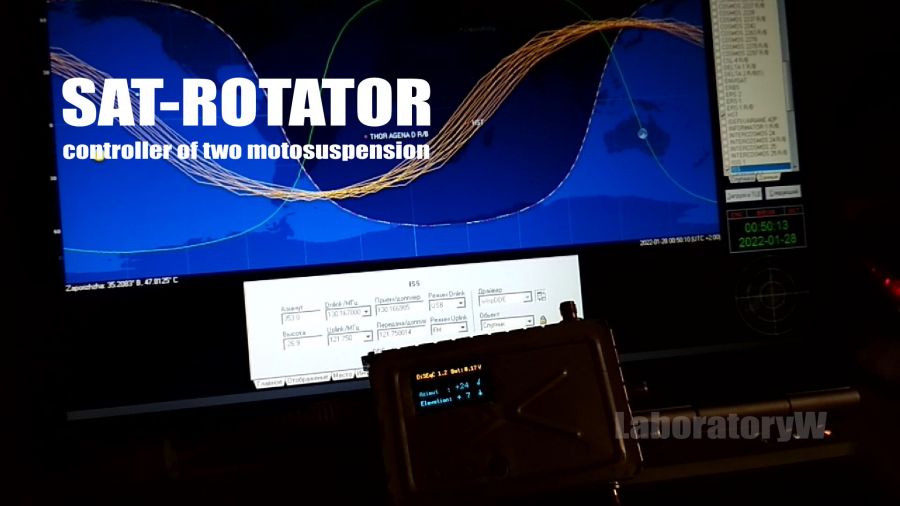



Інженерне меню
Для регулювання уставок (за замовчуванням -75 до +75 і допускає розширення -359 до +359) в автономному режимі перед увімкненням затисніть кнопку "Mode" і утримуйте її до появи заставки, при її появі відпустіть кнопку та з'явиться "Engineer Menu". Регулювання уставок MinRange здійснюється кнопками +/-, для регулювання MахRange одноразово натисніть кнопку + (або -) і після одразу + (або -). Щоб вийти з інженерного меню, натисніть кнопку "Mode".
Автономне керування
1. Перехід між режимами "DiseqC/DDS/SWR Fmin/SWR Fmax/SWR Zoom" здійснюється послідовним натисканням кнопки "Mode".
2. Керування азимутальним мотопідвісом за кнопками +/-, для керування мотопідвісом елевації одноразово натисніть кнопку + (або -) і після відразу + (або -). Положення ротора щодо півночі (нуля) відображається на дисплеї як цифрами, так і менімонічно. Команда на мотопідвіси надсилається через 1 секунду неактивності після останніх натискань на кнопки +/-.
3. Частота DDS та SWR Fmin/SWR Fmax контролюється кнопками +/-.
Віддалене управління
Налаштування порту 57600/8/N/1
Команди верхнього рівня в ASCII:
fxxxxxxxx Перемикання в режим DDS та завдання частоти в Hz
s Перемикання в режим панорамного аналізатора SWR (при цьому контролер надсилає панораму)
Wxxx eee Завдання азимуту та елевації (Orbitron/GS-232)
Mxxx Завдання азимуту (Orbitron/GS-232)
exxx Завдання елевації
rxxx Завдання уставки MaxRange
gxxx Завдання уставки MinRange
Все про антени, MESH мережi на Lora, РЕБ та РЕР


