иное
Як крутити теплак чи антену за допомогою StarLink-приводу, DiseqC чи PTZ
 503
503Дополнительная информация: raxp2.blogspot.com (по запрошенню)
Всі питання на пошту [email protected]

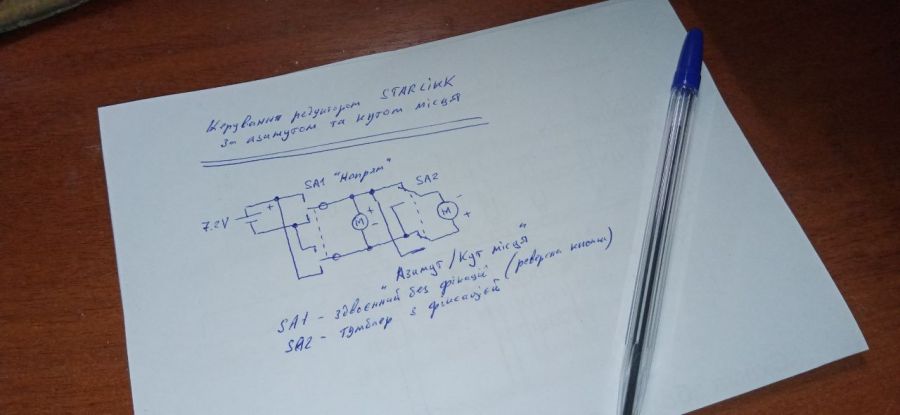
Звiсно, поворотку можна реалiзувати багатьма засобами, але в полi простiше - донорним StarLink, а точнiше - редуктором з ДПТ на ньому. Таких розбомблених супутникових термiналiв багато залишилося на наших полях. Нажаль. Антенна секцiя, кабель, електронiка можуть бути прострiленими, згорiвшими, але редуктори зазвичай цiлi у бiльшостi випадкiв. У тилу джерелом таких редукторів є переробки Starlink-терміналів на авто, пiсля яких залишаються у смiттi сам привод, кришка та стiйка з алюмiнiю. Схема для керування по дротам настiльки проста, що й малювати тяжко. Звичайна реверсна кнопа на 2 групи контактiв яка змінює полярність контактів, половинка редуктора, акумулятор на 7.2V з двох 18650 та модуль Multicell 2S контролера заряду. Оце й все, що треба для керування одним двигуном постiйного струму (ДПТ) по азимуту. Якщо треба керувати як по азимуту, так й по куту мiсця, то достатньо додати ще одну реверсну кнопку, як варiант. Звiсно, ДПТ не кроковик, тому такий варiант вимагатиме спостереження за положенням або додавання кінцевиків, що обмежують межі положень редуктора.
STARLINK
Для локального керування та при необхiдностi вiддаленого контролю over захищений ППРЧ та AES256 радiоканал термiнали LoraSAT пiдтримують роботу з H-мостом та протоколи Pelco-D й DiseqC:
(повний плейлист)
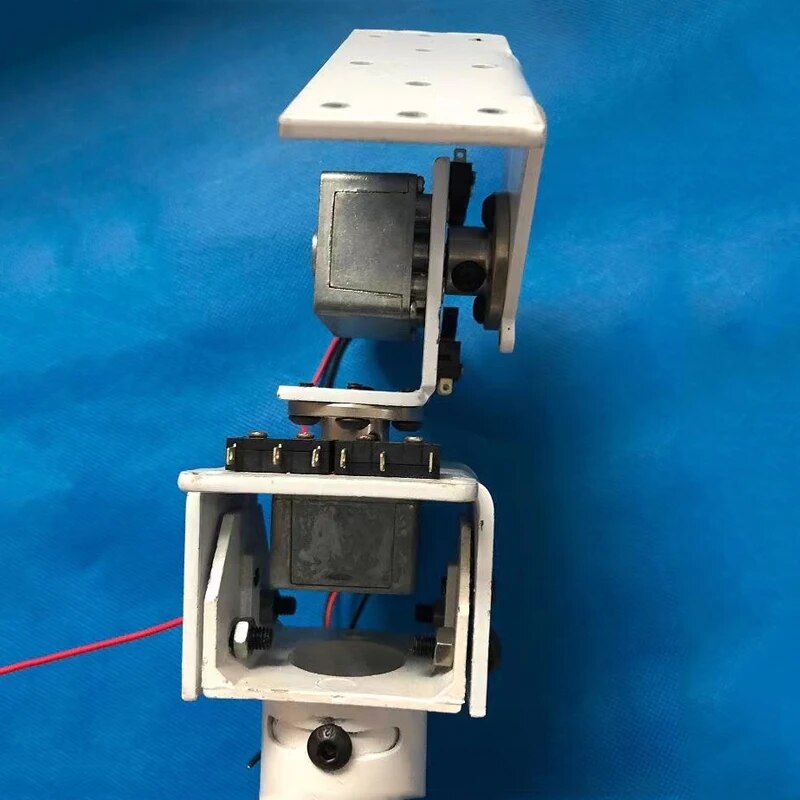
Особливiсть цього редуктора в тому, що коли треба крутити по азимуту, то обидва ДПТ повиннi обертатися в протилежних напрямках, якщо по куту мiсця - в однакових.
PTZ камери
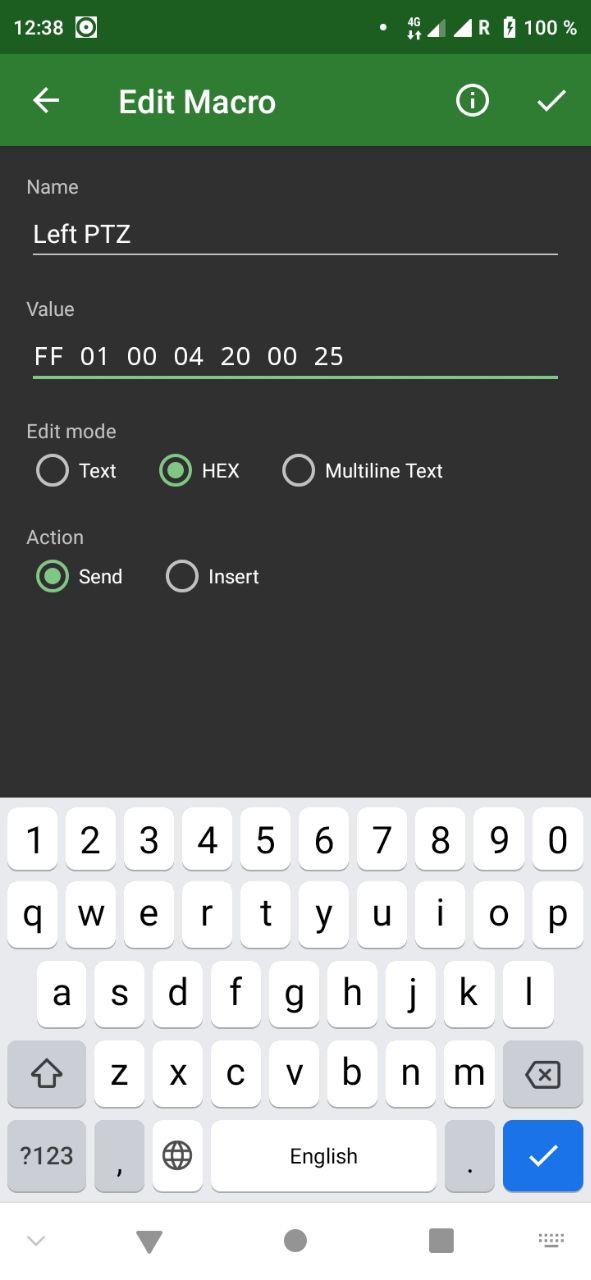
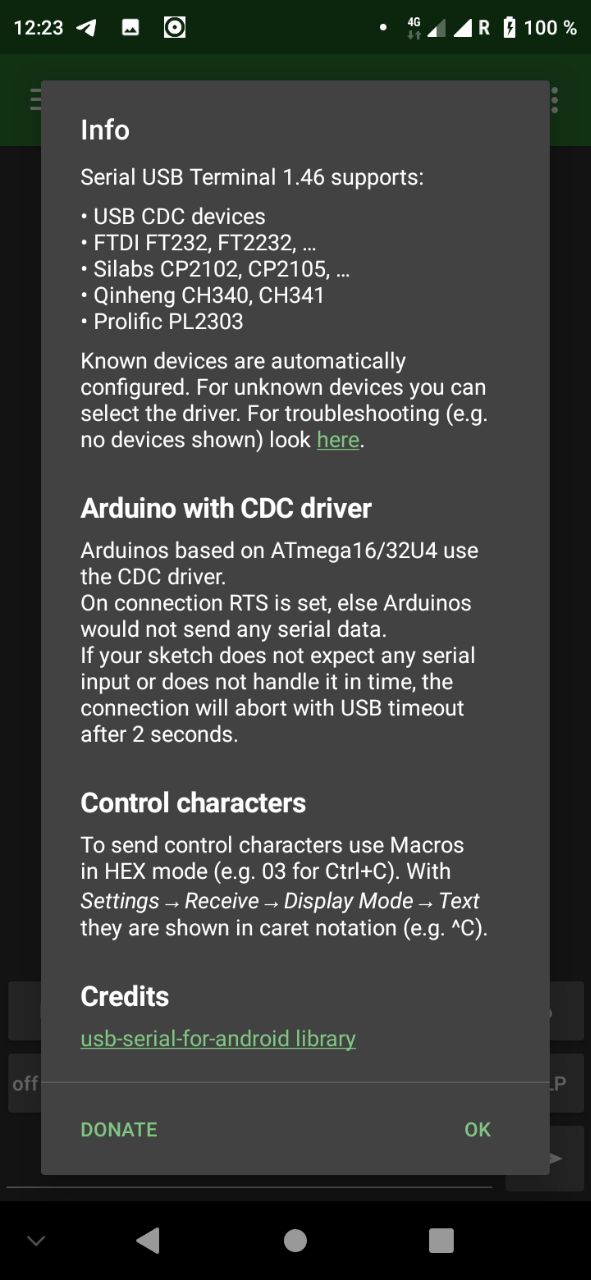
Окрiм механiки старлiнка можна використати PTZ камери спостереження, керування якими можливо по iнтерфейсу RS-485 по протоколу Pelco-D. Причому керування можливе навiть з смартфону з пiдтримкою OTG, якщо емулювати вiдправку наборiв команд у Pelco-D протоколi. У якостi готового додатку пiдiйде Serial USB Terminal. Зручнiсть в тому, що розробник передбачив макроси та кнопки користувача з власними наборами команд - стільки, скільки кому потрібно. У тому рахунку в HEX форматi. Треба лише додати конвертор USB/RS-485. Наприклад, на базi двох USB/UART TTL (на CP2102 або CH9102) + конвертора UART TTL/RS-485. Якщо смартфону нема, то пульт можна реалiзувати на базi DIY плат типу ESP32 або Arduino. Наприклад, макетний варiант Влада UW5EGA:
Якщо подивитись приклади керування PTZ камерою з наших попереднiх розробок, то маємо наступнi набори команд:
On = FF 00 00 00 00 00 00
Up = FF 01 00 08 00 20 29
Down = FF 01 00 10 00 20 31
Left = FF 01 00 04 20 00 25
Right = FF 01 00 02 20 00 23
Де:
BYTE 1 - преамбула за замовчуванням 0xFF
BYTE 2 - адреса керованої камери (наприклад, камера 1 має адресу 0x01)
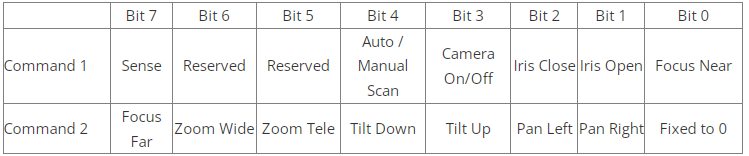
BYTE 3 - Command 1
BYTE 3 - Command 2
BYTE 5 - швидкість по азимуту (0x00 - швидкість 0, 0x3F - максимальна можлива швидкість, «турбо» швидкість = 0xFF)
BYTE 6 - швидкість по куту мiсця;
BYTE 7 - СRC (байт синхронізації не враховується)
Розберемо для команди Left = FF 01 00 04 20 00 25
1. FF преамбула
2. 01 адреса
3. 00 команда 1 (нiчого не робимо)
4. 04 команда 2 (крутимо лiворуч)
5. 20 швидкiсть ротатору по азимуту = 32
6. 00 швидкiсть ротатору по куту мiсця (нiчого не робимо)
7. 25 CRC по всiм байтам, окрiм преамбули = 01h+00h+04h+20h+00h = 25h
DiseqC
На вiдмiну вiд Starlink та PTZ керування DiseqC однозначне та не вимагатиме додаткого контролю або спостереження. Наприклад, виплюнув команду в позiцiонер поставити в положення 30 градусiв, воно чiтко там буде. В якостi пульта керування пiдiйде будь-який супутниковий тюнер з IЧ пультом та невеличким монiтором. Оцe звiсно мiнус, тому можна використати автономний варiант по типу https://ur8lv.com/1621770139:
(або те ж саме реалiзоване в термiналах LoraSAT як опцiя вище)
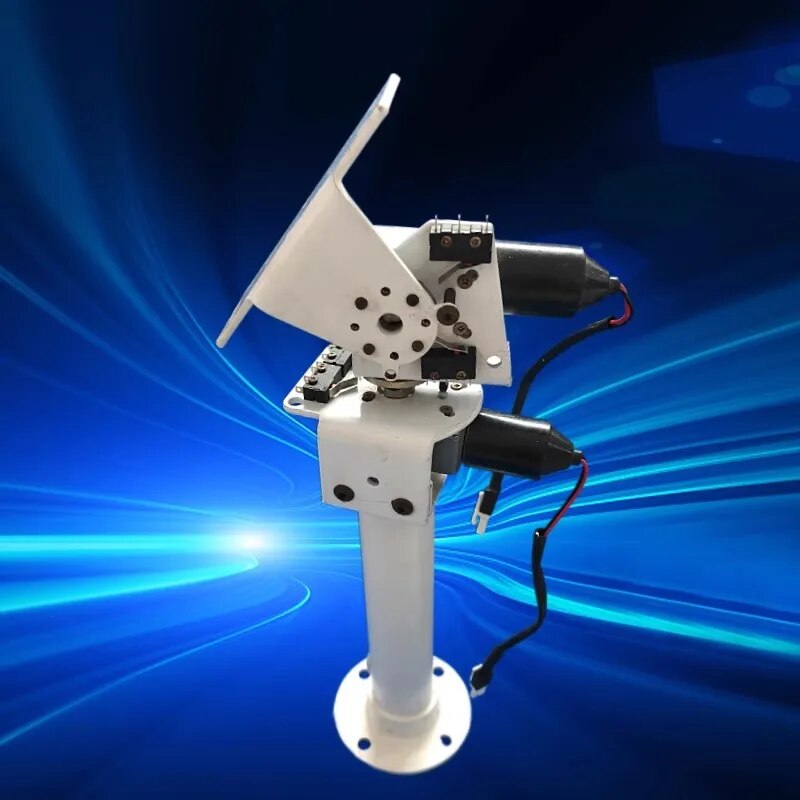
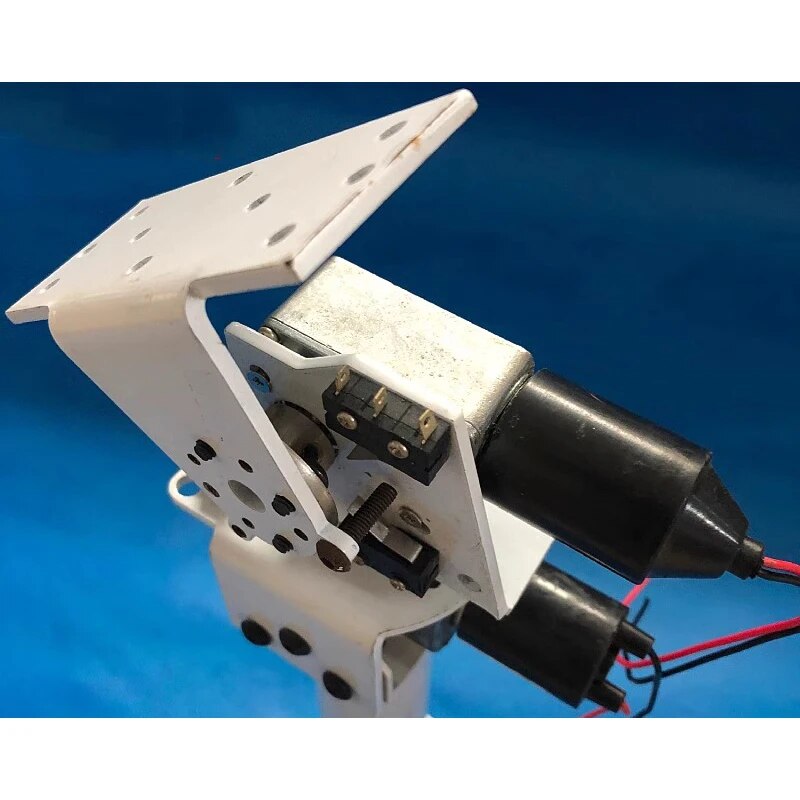
p.s.: готовi платформи повороток також доступнi у китайцiв, наприклад оцей варiант для кута мiсця до 120 градусiв та меж за азимутом до 340 градусiв




STARLINK
Для локального керування та при необхiдностi вiддаленого контролю over захищений ППРЧ та AES256 радiоканал термiнали LoraSAT пiдтримують роботу з H-мостом та протоколи Pelco-D й DiseqC:
(повний плейлист)
Особливiсть цього редуктора в тому, що коли треба крутити по азимуту, то обидва ДПТ повиннi обертатися в протилежних напрямках, якщо по куту мiсця - в однакових.
PTZ камери
Окрiм механiки старлiнка можна використати PTZ камери спостереження, керування якими можливо по iнтерфейсу RS-485 по протоколу Pelco-D. Причому керування можливе навiть з смартфону з пiдтримкою OTG, якщо емулювати вiдправку наборiв команд у Pelco-D протоколi. У якостi готового додатку пiдiйде Serial USB Terminal. Зручнiсть в тому, що розробник передбачив макроси та кнопки користувача з власними наборами команд - стільки, скільки кому потрібно. У тому рахунку в HEX форматi. Треба лише додати конвертор USB/RS-485. Наприклад, на базi двох USB/UART TTL (на CP2102 або CH9102) + конвертора UART TTL/RS-485. Якщо смартфону нема, то пульт можна реалiзувати на базi DIY плат типу ESP32 або Arduino. Наприклад, макетний варiант Влада UW5EGA:
Якщо подивитись приклади керування PTZ камерою з наших попереднiх розробок, то маємо наступнi набори команд:
On = FF 00 00 00 00 00 00
Up = FF 01 00 08 00 20 29
Down = FF 01 00 10 00 20 31
Left = FF 01 00 04 20 00 25
Right = FF 01 00 02 20 00 23
Де:
BYTE 1 - преамбула за замовчуванням 0xFF
BYTE 2 - адреса керованої камери (наприклад, камера 1 має адресу 0x01)
BYTE 3 - Command 1
BYTE 3 - Command 2
BYTE 5 - швидкість по азимуту (0x00 - швидкість 0, 0x3F - максимальна можлива швидкість, «турбо» швидкість = 0xFF)
BYTE 6 - швидкість по куту мiсця;
BYTE 7 - СRC (байт синхронізації не враховується)
Розберемо для команди Left = FF 01 00 04 20 00 25
1. FF преамбула
2. 01 адреса
3. 00 команда 1 (нiчого не робимо)
4. 04 команда 2 (крутимо лiворуч)
5. 20 швидкiсть ротатору по азимуту = 32
6. 00 швидкiсть ротатору по куту мiсця (нiчого не робимо)
7. 25 CRC по всiм байтам, окрiм преамбули = 01h+00h+04h+20h+00h = 25h
DiseqC
На вiдмiну вiд Starlink та PTZ керування DiseqC однозначне та не вимагатиме додаткого контролю або спостереження. Наприклад, виплюнув команду в позiцiонер поставити в положення 30 градусiв, воно чiтко там буде. В якостi пульта керування пiдiйде будь-який супутниковий тюнер з IЧ пультом та невеличким монiтором. Оцe звiсно мiнус, тому можна використати автономний варiант по типу https://ur8lv.com/1621770139:
(або те ж саме реалiзоване в термiналах LoraSAT як опцiя вище)
p.s.: готовi платформи повороток також доступнi у китайцiв, наприклад оцей варiант для кута мiсця до 120 градусiв та меж за азимутом до 340 градусiв


